El laboratorio cuenta con equipo para realizar los experimentos básicos para el área de control. Los equipos pueden ser utilizados desde Simulink lo que facilita la realización de la fase experimental de los estudiantes de control.
En el laboratorio de control automático se cuenta con equipo de Quanser para la realización de experimentos de control, dentro de este equipo se tiene lo siguiente:
- Dos dispositivos hapticos
- Equipo para realizar experimentos con el motor lineal
- Equipo para realizar experimentos con el motor rotatorio
- Equipo para realizar experimentos con un sistema de levitación magnética
- Equipo para realizar experimentos con el péndulo rotacional
- Equipo para realizar experimentos con el péndulo invertido
El equipo de control lineal que se muestra en la Figura 30, permite usar uno o más carros para pruebas de control, así como péndulo o doble péndulo.
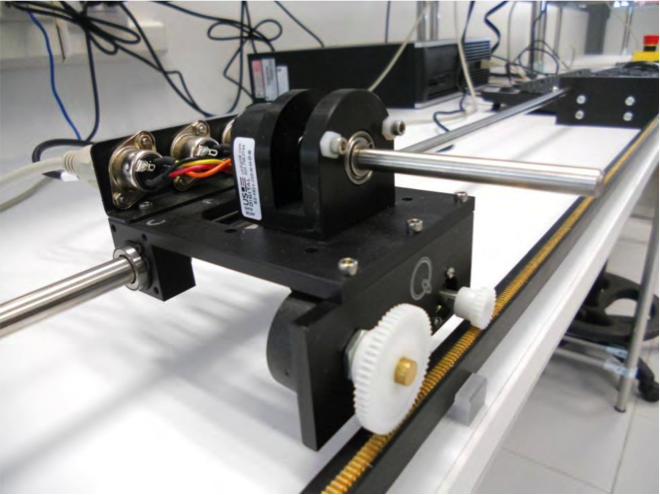
Figura 30. Equipo de control lineal
El equipo de balancín, unido a los carros y el equipo lineal se puede observar en la Figura 31.

Figura 31. Equipo de balancín
El equipo para el control rotacional se puede observar en la Figura 32.
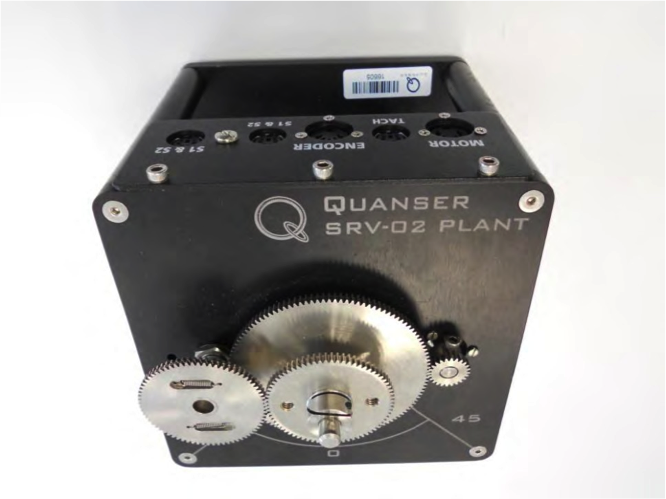
Figura 32. Planta Quanser para experimentos rotacionales
El equipo Maglev se muestra en la Figura 33 y se utiliza para controlar un levitador magnético.

Figura 33. Maglev, equipo para experimentar con el control de un levitador magnético
El equipo Couple tank se muestra en la Figura 34 y se utiliza para realizar el control de niveles de agua de dos tanques.
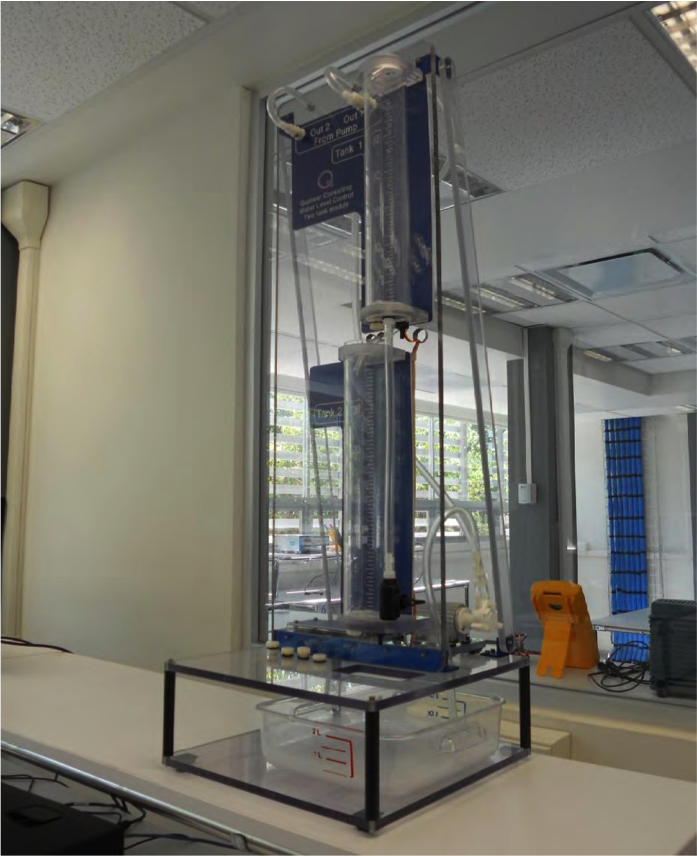
Figura 34. Equipo para hacer pruebas con controladores que nivelen el agua de dos tanques
También se cuenta con dos dispositivos hapticos Phantom Desktop como se puede ver en la Figura 35, para pruebas y programación.

Figura 35. Dispositivos haptics, marca Quanser
Así como con un robot manipulador Denso-V6, con 6 grados de libertad que se puede observar en la Figura 36.

Figura 36. Robot manipulador Denso-V6 con 6 grados de libertad
El laboratorio de control tiene a su disposición un helicóptero de 3 grados de libertad, marca Quanser, que se puede observar en la Figura 37.

Figura 37. Helicóptero 3 DOF de Quanser
El equipo para el control de motor de inducción así como Tarjetas DSPACE 1104 para control en tiempo real, conector LED panel para tarjeta Dspace y fuente de poder con cuatro salidas, sistema para adquisición de datos, sistema embebido avanzado de control y monitoreo en tiempo real; y sistema de monitoreo en continuo de glucosa y microinfusora de insulina se pueden apreciar en las Figuras 38 a la 43.
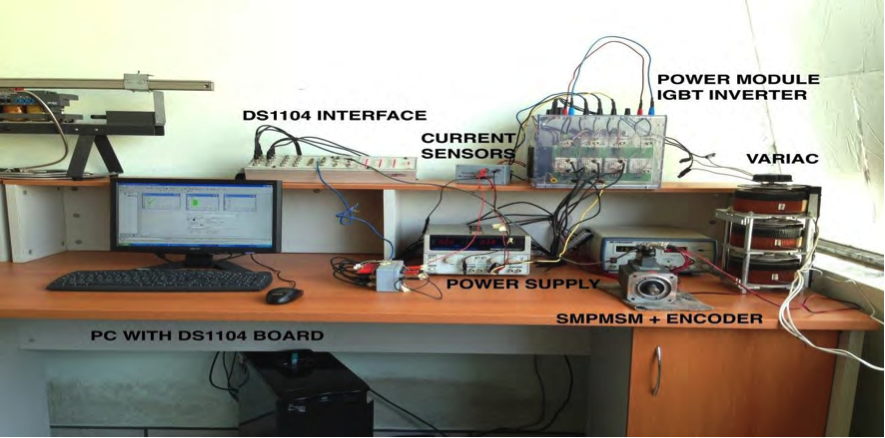
Figura 38. Equipo para el control de motor de inducción

Figura 39. Tarjeta DSPACE 1104 para control en tiempo real

Figura 40. Conector LED panel para tarjeta Dspace y fuente de poder 4 salidas

Figura 41. Sistema para adquisición de datos COMPACTAC

Figura 42. Sistema embebido avanzado de control y monitoreo en tiempo real, Ni CompactR10

Figura 43. Sistema de monitoreo en continuo de glucosa y microinfusora de insulina